Назначение системы:
Планирование и контроль выполнения хирургических вмешательств в нейрохирургии, ЛОР-хирургии, хирургии позвоночника, челюстно-лицевой хирургии, ортопедии и травматологии.
Система может использоваться в качестве виртуального тренажера для обучения хирургов.
Принцип работы системы состоит в возможности прослеживания движения хирургических инструментов в областях тела пациента, невидимых для глаз хирурга.
В качестве примера рассмотрим операции на головном мозге.
Сначала проводят предварительное обследование головы пациента на КТ или МРТ томографе и строят 3D изображение области, которую будут оперировать. Для предотвращения непроизвольных движений голову пациента помещают в стационарный позиционер – скобу Мейфилда, позиция которой также отслеживается системой. С помощью щупа-зонда со светоотражающими маркерами, которые видны стереокамерам в инфракрасном свете, регистрируют положение головы и привязывают координаты головы к 3D КТ/МРТ изображению. Для определения координат головы пациента к скобе Мейфилда прикрепляют световозвращающие маркеры, которые видны стереокамерам. Таким образом, в пространстве соотносится реальное положение головы пациента и 3D КТ/МРТ изображения головы этого пациента.
Такие же маркеры прикрепляются к хирургическим инструментам. Врач во время операции работает этими инструментами, а стереоскопическая система определяет их координаты. Поскольку все объекты: 3D изображение, голова пациента и хирургические инструменты находятся в одной системе координат, программное обеспечение системы на экране монитора компьютера показывает нахождение и движение хирургических инструментов на 3D изображении, что позволяет хирургу наблюдать на экране оперируемую область и движение в ней хирургических инструментов в режиме реального времени.
В качестве световозвращающих маркеров в системе используются стерильные пассивные маркеры - световозвращающие сферы, которые устанавливаются на уникальные насадки, которые в свою очередь крепятся на хирургические инструменты и устройство для регистрации головы пациента.
| Блок управления | Блок видеокамер |
 |  |
Система имеет два варианта исполнения:
Система имеет две передвижные вертикальные стойки. На одной стойке расположен оптический блок с двумя видеокамерами и инфракрасным осветителем. На второй стойке расположен блок управления с двумя сенсорными мониторами для хирурга и его ассистента.
При одностоечном исполнении системы оптический блок и блок управления с одним монитором устанавливаются на этой стойке. Система получается более компактной.
Характеристики системы навигации «Мультитрек»
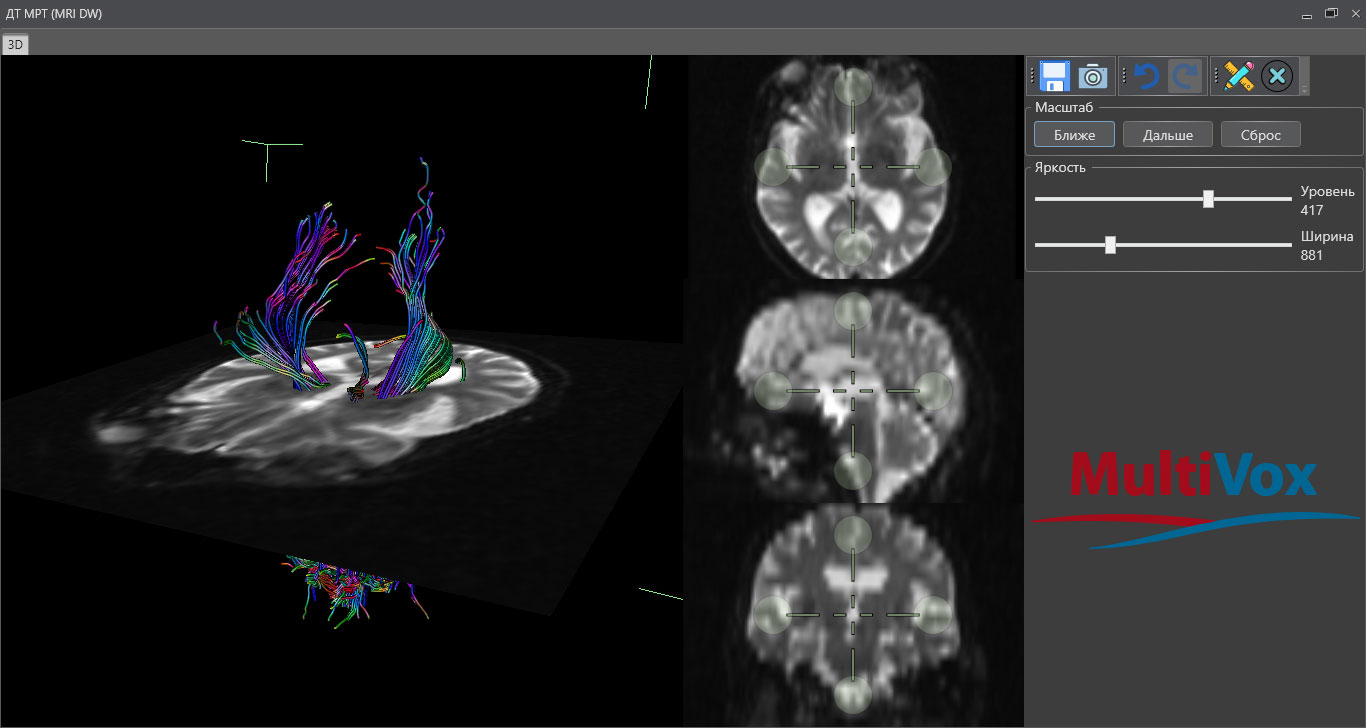
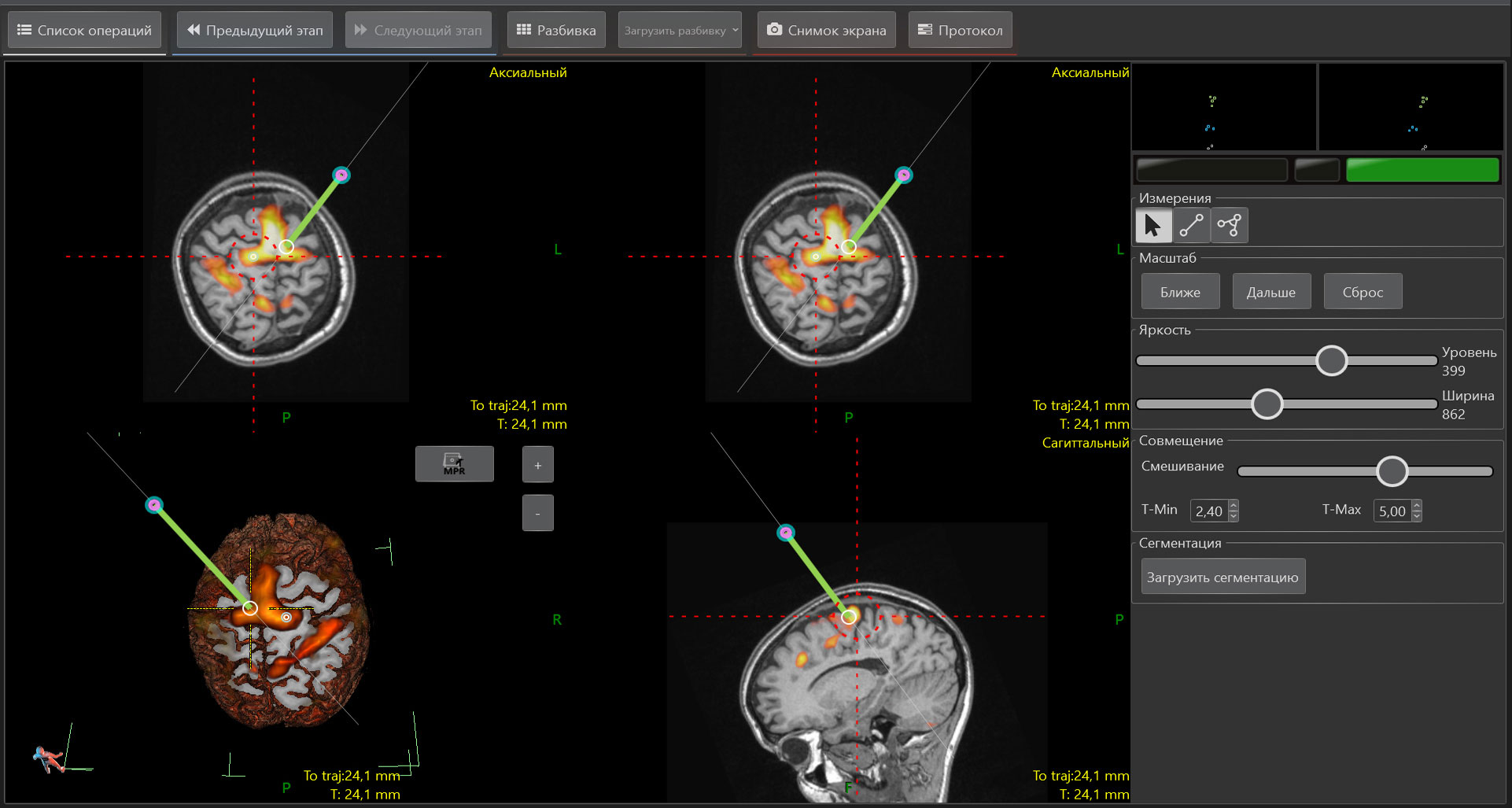
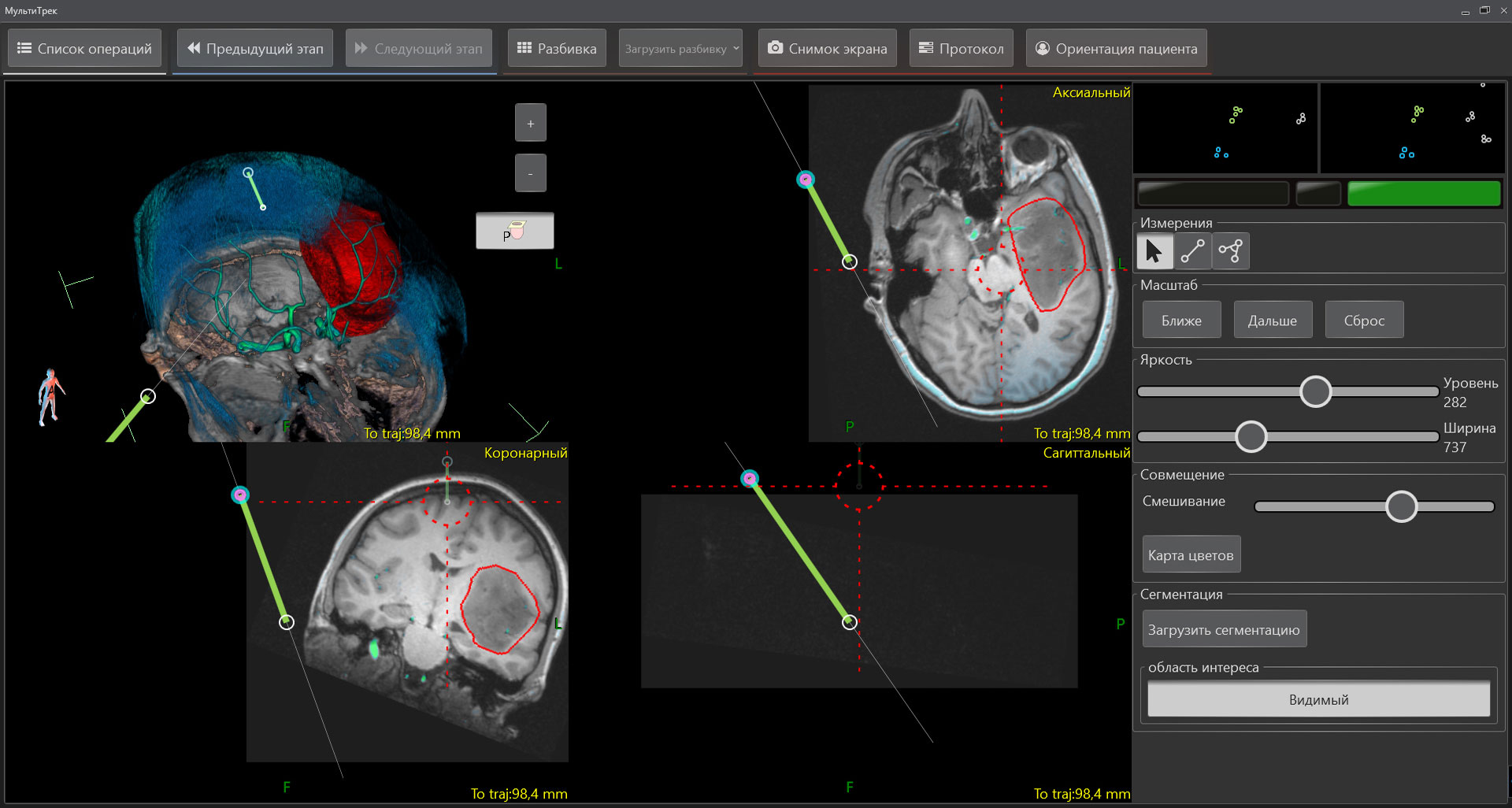
Система имеет в составе автоматизированное рабочее место врача диагноста серии «Гамма Мультивокс», предназначенное для полномасштабной работы с 2D/3D медицинскими изображениями разных модальностей (КТ, МРТ, ПЭТ, рентген, УЗ и пр.) для планирования навигации.
Рабочий цикл навигационной системы состоит из следующих этапов:
Отличие от зарубежных аналогов
Основным отличием разрабатываемой навигационной системы от зарубежных аналогов является наличие отечественного программного обеспечения, использующего собственные разработанные, опробованные и внедренные компоненты и методы визуализации и обработки 2D/3D медицинских изображений.
95% компонентов системы производятся в России, что позволяет значительно снизить стоимость готового изделия.
Планируется расширить область применения Системы «МУЛЬТИТРЕК», для чего осуществить ее интеграцию: с рентгеновской хирургической С-дугой, микроскопом, УЗ прибором.
Система «МУЛЬТИТРЕК» имеет Регистрационное удостоверение Росздравнадзора от 07.10.2019г. № РЗН 2019/9001.